Home
Camme CMM2000
CMM2000
Manuale On-Line
NOVITA' in CMM2000 :
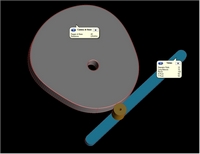
Camme Piane
con
Telaio Complesso
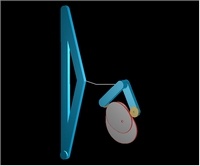
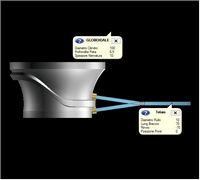
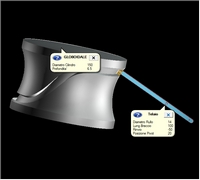
Camme Globoidali
con Pista a Nervatura
e Telaio Posteriore
Con Pista Scanalata
e Telaio Frontale
English Version
www.camsoft.it/CMM2000/manuale On-Line
CMM2000 -
Manuale Utente On-Line
INDICE
Introduzione
Finestra delle Leggi
Dati di input
Menù di INPUT
LEGGI DI MOTO
Cerchio Concentrico
Spirale di Archimede
Cicloide
Armonica Semplice
Doppia Armonica
Sinusoide Modificata ( Bestehorn )
Parabola
Trapezoide Modificata
Cubica tipo 1
Cubica tipo 2
Sequenza di Punti
Polinomiali
Sinoide Modificata
Importa da CMM
Importa da File CAD 2D
File di Punti
Menù MODIFICA
Modifica delle Leggi
Modifica Grafica
Finestra dei PROFILI
Camma PIANA
Cedente a Punteria (disassato e non)
Cedente a Leva
Cedente a Piattello
Cedente Complesso
Camma LINEARE
CAMMA GLOBOIDALE
Grafici
Raggio di Curvatura
Angolo di Pressione
Forza Totale
Momento Torcente
Pressione di Contatto
Infittimento
PROFILI SPECIALI ( Dispositivi Intermittenti )
Croce di Malta ( Geneva Wheel )
Ruota Stellare ( Star Wheel )
Intermittori a Tamburo
Placca di Rotazione ( Indexed Turret )
Menù delle OPZIONI
Punti Notevoli
Personalizzazioni
Finestra di SIMULAZIONE 3D
OUTPUT
Stampa
Export 2D ( DXF , MI )
Export 3D ( STEP , IGES , STL e VRML )
Finestra dei DATI
Bibliografia
Torna alla Home page.
© Copyright 1982-2025
CAM-SOFT S.R.L.
Tutti i diritti sono riservati.
P.IVA 08011640961
-
Privacy